|
Changyi Lin
I am a final-year Ph.D. student at CMU Safe AI Lab, advised by Prof. Ding Zhao. I received dual bachelor's degrees in ME and CS from Huazhong University of Science and Technology (HUST). Before joining CMU, I spent a gap year exploring robotics research at Tsinghua Embodied AI Lab, advised by Prof. Huazhe Xu. I also spent a wonderful summer as a research intern at Bosch AI in 2025. Email | Google Scholar | Github | Twitter | LinkedIn |

|
ResearchI aim to enhance physically grounded robotic interaction through full-stack, data-oriented solutions across hardware, sensing, control, and learning. My current research focuses on multimodal dexterous manipulation, whole-body control, and tactile sensor design. |
|
ART-Glove: Articulated Tactile Glove for Contact-Grounded Dexterous Interaction Capture
Changyi Lin and Ding Zhao
arxiv 2026
paper | website | X Capturing contact-grounded dexterous interaction while preserving human dexterity! Known geometry: 16 rigid functional surfaces Surface motion: 22 anatomically aligned joints Tactile contact: 2048 piezoresistive taxels |
|
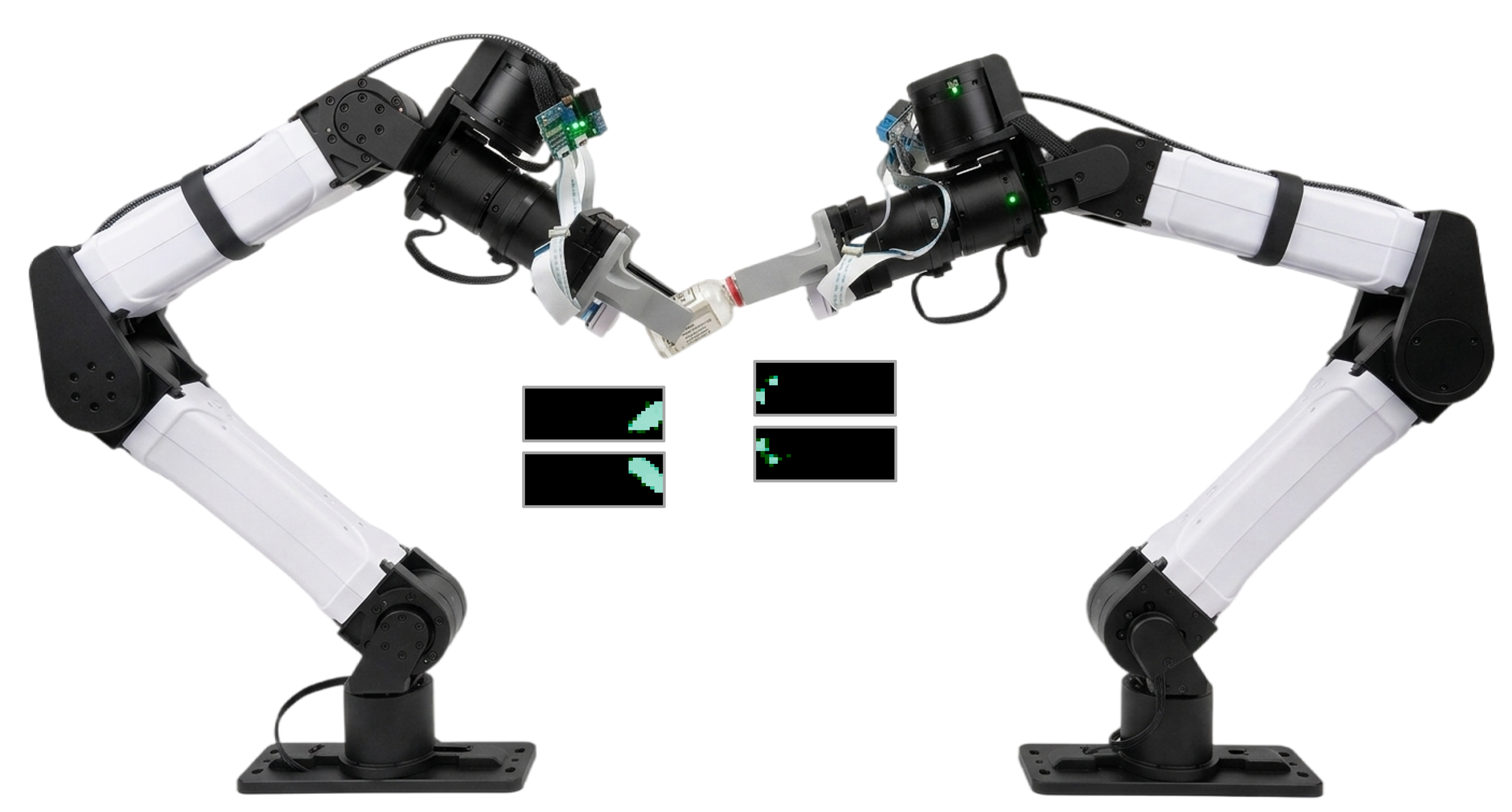
HiPi: Reproducible High-Fidelity Piezoresistive Sensors for Robotic Manipulation
Changyi Lin, Raihan Haque, Hui-Ping Wang, and Ding Zhao
arXiv 2026
paper | website | open-source Making dense piezoresistive tactile sensing both high-fidelity and reproducible! HiPi combines low-crosstalk readout with a reproducible hardware stack. It supports four dense tactile arrays with 2048 taxels at 220 Hz for bimanual robotic manipulation. |
|
LightTact: A Visual-Tactile Fingertip Sensor for Deformation-Independent Contact Sensing
Changyi Lin*, Boda Huo*, Mingyang Yu, Emily Ruppel, Bingqing Chen, Jonathan Francis, and Ding Zhao RSS 2026 paper | website | open-source Physical contact, even slight contact, becomes directly observable! LightTact is a visual-tactile fingertip sensor that detects contact through light transmission instead of surface deformation. By making contact pixels visible while keeping non-contact pixels dark, it provides deformation-independent, pixel-level contact sensing. |
|
APEX: Learning Adaptive High-Platform Traversal for Humanoid Robots
Yikai Wang*, Tingxuan Leng*, Changyi Lin*, Shiqi Liu, Shir Simon, Bingqing Chen, Jonathan Francis, and Ding Zhao
IROS 2026
paper | website | video Humanoid robots adaptively traverse high platforms through contact-rich climbing! APEX enables humanoid robots to traverse high platforms through contact-rich climbing and a unified multi-skill policy. With ratchet progress rewards and LiDAR-based perception, it achieves zero-shot sim-to-real traversal of 0.8 m platforms (114% of leg length). |
|
LocoTouch: Learning Dynamic Quadrupedal Transport with Tactile Sensing
Changyi Lin, Yuxin Ray Song, Boda Huo, Mingyang Yu, Yikai Wang, Shiqi Liu, Yuxiang Yang, Wenhao Yu, Tingnan Zhang, Jie Tan, Yiyue Luo, and Ding Zhao CoRL 2025 paper | website | video | code | X | media( IEEE Spectrum, CMU Engineering News) Tactile sensing unlocks a new level of contact-rich interaction for legged robots! Equipped with a high-density distributed tactile sensor, our quadrupedal robot can transport everyday objects without mounting or strapping. The transport policy achieves zero-shot sim-to-real transfer, featuring two task-agnostic components: high-fidelity tactile simulation and robust, symmetric, frequency-adaptive gaits. |
|
LocoMan: Advancing Versatile Quadrupedal Dexterity with Lightweight Loco-Manipulators Changyi Lin, Xingyu Liu, Yuxiang Yang, Yaru Niu, Wenhao Yu, Tingnan Zhang, Jie Tan, Byron Boots, and Ding Zhao IROS 2024 (Featured Cover on IEEE Spectrum) paper | website | video | open-source | mac-mini setup | X | media(IEEE Spectrum Cover, TechXplore, CMU Engineering News) Limbs are not just for walking, they can also be arms for manipulation! We reimagine quadrupedal limbs as 6-DoF arms by equipping them with custom-designed manipulators that mimic huma wrists. Powered by a unified whole-body controller, LocoMan can perform a wide range of dexterous manipulation tasks. |
|
9DTact: A Compact Vision-Based Tactile Sensor for Accurate 3D Shape Reconstruction and Generalizable 6D Force Estimation
Changyi Lin, Han Zhang, Jikai Xu, Lei Wu, and Huazhe Xu
RAL & ICRA 2024(Adopted by Multiple Labs)
paper | website | video | open-source | dataset | X | tutorial-en | tutorial-cn 9DTact = 3D Shape Reconstruction + 6D Force Estimation! Only white light! No markers! One-shot calibration! Easy fabrication! Open source! So many features to explore! Why not check out the website? |
|
DTact: A Vision-Based Tactile Sensor that Measures High-Resolution 3D Geometry Directly from Darkness
Changyi Lin, Ziqi Lin, Shaoxiong Wang, and Huazhe Xu
ICRA 2023
paper | website | video | open-source | X | media(Technology) The deeper you press, the darker you see. We leverage the reflection property of translucent silicone to reconstruct 3D contact geometry using only white light. We also demonstrate its robustness and feasibility for non-planar contact surfaces. |
Other Publications |
|
Human2LocoMan: Learning Versatile Quadrupedal Manipulation with Human Pretraining Yaru Niu*, Yunzhe Zhang*, Mingyang Yu, Changyi Lin, Chenhao Li, Yikai Wang, Yuxiang Yang, Wenhao Yu, Tingnan Zhang, Zhenzhen Li, Jonathan Francis, Bingqing Chen, Jie Tan, and Ding Zhao RSS 2025 paper | website | video | code | X LocoMan can now perform various household tasks autonomously. |
|
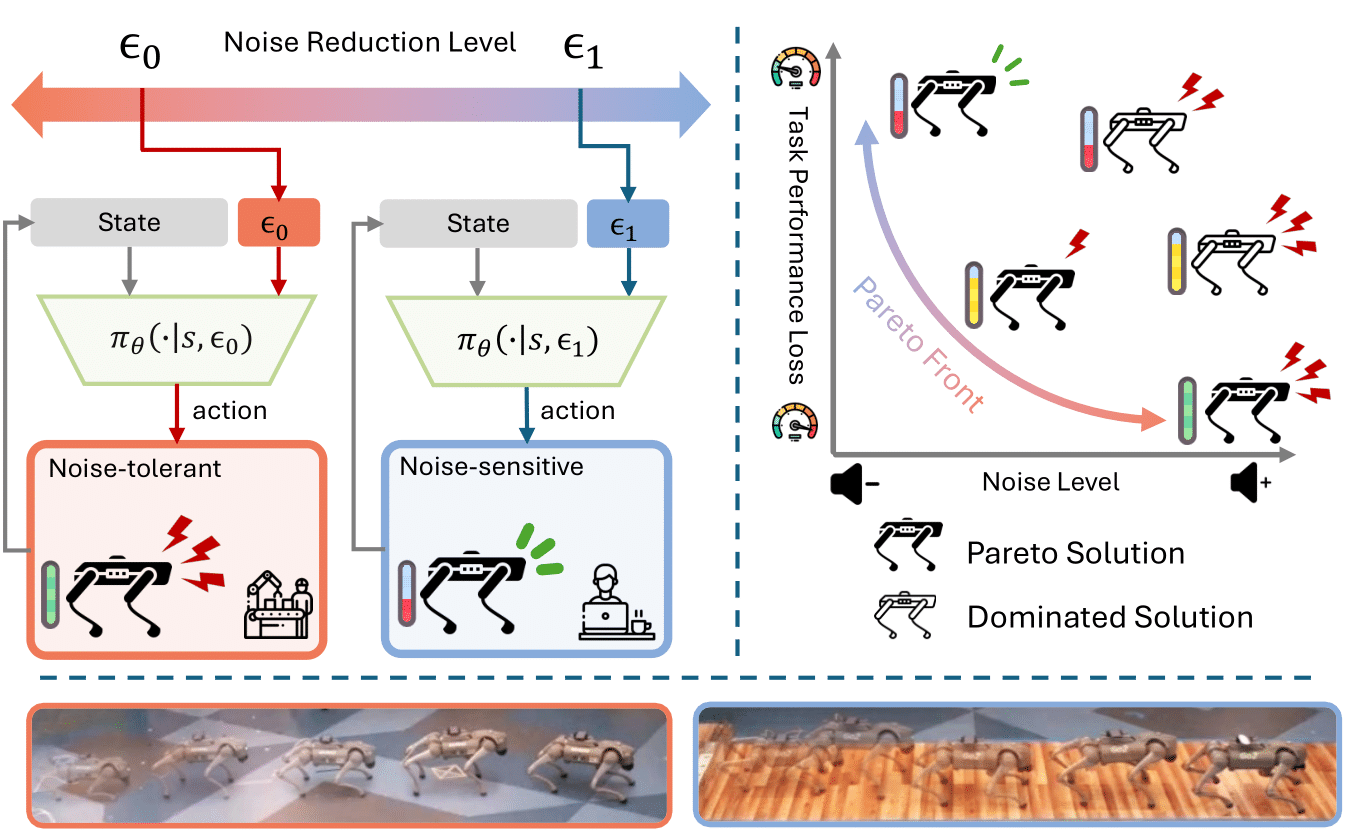
QuietPaw: Learning Quadrupedal Locomotion with Versatile Noise Preference Alignment Yuyou Zhang, Yihang Yao, Shiqi Liu, Yaru Niu, Changyi Lin, Yuxiang Yang, Wenhao Yu, Tingnan Zhang, Jie Tan, and Ding Zhao IROS 2025 paper Quadrupedal robots adapt their behaviors to satisfy diverse noise preferences. |
|
DTactive: A Vision-Based Tactile Sensor with Active Surface
Jikai Xu*, Lei Wu*, Changyi Lin, Ding Zhao, and Huazhe Xu
IROS 2025
paper | website | open-source | X An active-surface tactile sensor enables efficient and precise in-hand manipulation. |

|
Agile Continuous Jumping in Discontinuous Terrains
Yuxiang Yang, Guanya Shi, Changyi Lin, Xiangyun Meng, Rosario Scalise, Mateo Guaman Castro, Wenhao Yu, Tingnan Zhang, Ding Zhao, Jie Tan, Byron Boots ICRA 2025 paper | website | video | code | X Legged robots perform agile, terrain-adaptive continuous jumping across discontinuous terrains. |
|
ArrayBot: Reinforcement Learning for Generalizable Distributed Manipulation through Touch
Zhengrong Xue*, Han Zhang*, Jingwen Cheng, Zhengmao He, Yuanchen Ju, Changyi Lin, Gu Zhang, and Huazhe Xu ICRA 2024 paper | website | video | code | X A distributed robot translates diverse objects with tactile sensing. |
Projects |
|
Generalizable BeamWalking for Legged Robots with Reinforcement Learning
Course Project for Intro to Robot Learning(16-831 by Deepak Pathak) Techniques: Reinforcement Learning, Curriculum Learning, Computer Vision |
|
|
RoboMaster Robotics Competition
Engineer Robot 2019, Dart System 2020, SLAM System 2021 Techniques: Mechanical Design, Control, SLAM, Computer Vision |
Academic Services
|
|
Template from Jon Barron's website. |