Abstract
Quadrupedal robots have emerged as versatile agents capable of locomoting and manipulating in complex environments. Traditional designs typically rely on the robot's inherent body parts or incorporate top-mounted arms for manipulation tasks. However, these configurations may limit the robot's operational dexterity, efficiency and adaptability, particularly in cluttered or constrained spaces.
In this work, we present LocoMan, a dexterous quadrupedal robot with a novel morphology to perform versatile manipulation in diverse constrained environments. By equipping a Unitree Go1 robot with two low-cost and lightweight modular 3-DoF loco-manipulators on its front calves, LocoMan leverages the combined mobility and functionality of the legs and grippers for complex manipulation tasks that require precise 6D positioning of the end effector in a wide workspace. To harness the loco-manipulation capabilities of LocoMan, we introduce a unified control framework that extends the whole-body controller (WBC) to integrate the dynamics of loco-manipulators.
Through experiments, we validate that the proposed whole-body controller can accurately and stably follow desired 6D trajectories of the end effector and torso, which, when combined with the large workspace from our design, facilitates a diverse set of challenging dexterous loco-manipulation tasks in confined spaces, such as opening doors, plugging into sockets, picking objects in narrow and low-lying spaces, and bimanual manipulation.
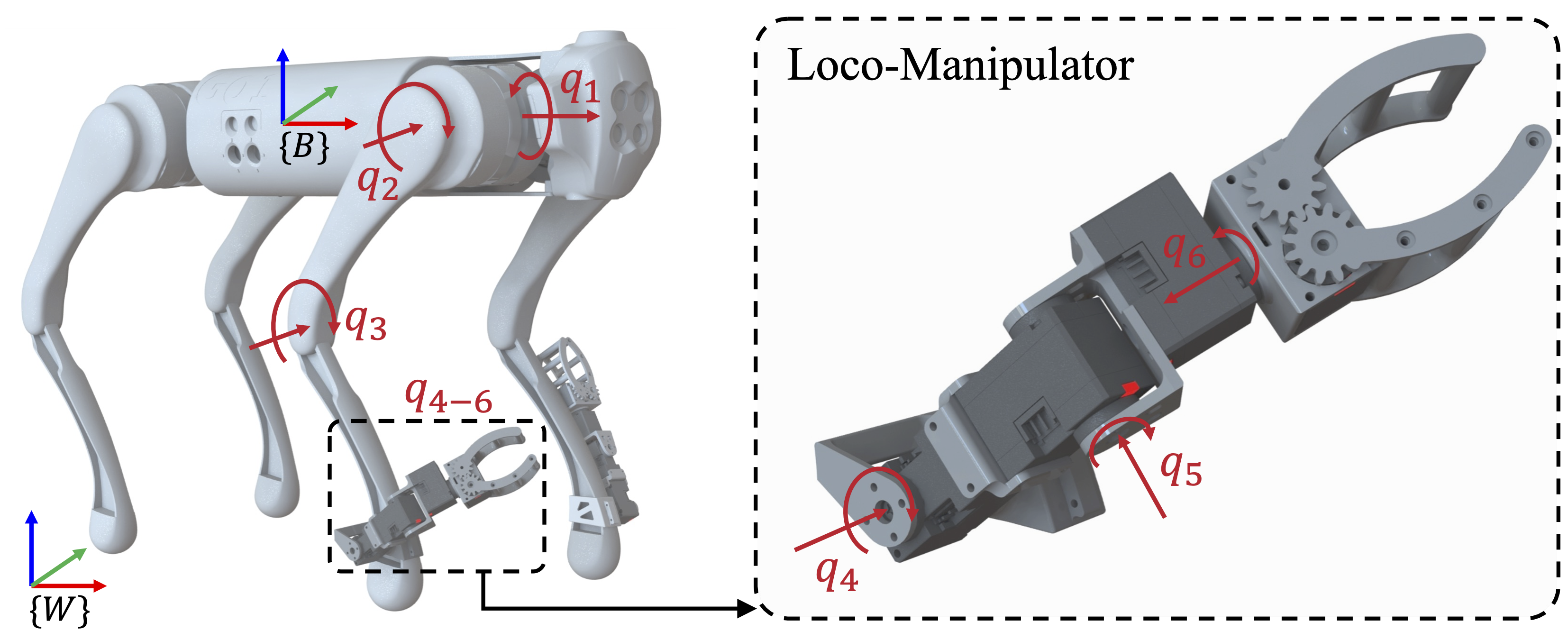
Design of Loco-Manipulator
The core idea is to leverage the leg as an integral component of the "robotic arm" for executing 6D pose manipulation. Therefore, we design Loco-Manipulator to contribute the other three DoFs. Loco-Manipulator is compact, lightweight (147g), low-cost ($370), and easy-to-fabricate. The main components are four commercially available servos (three for the joints and one for the gripper) and some 3d-printed parts.
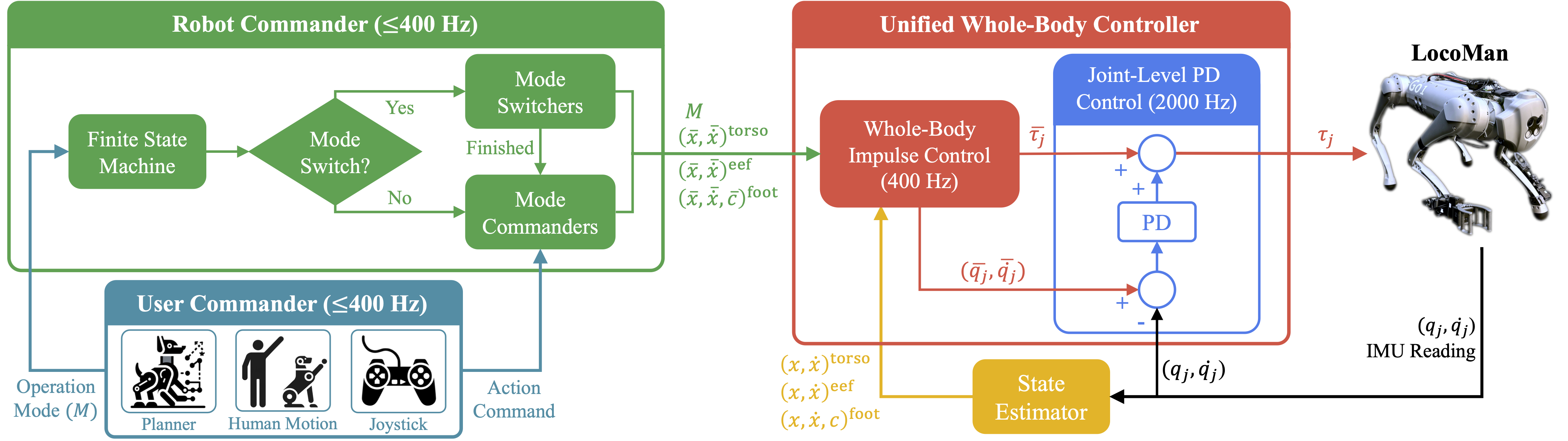
A Unified Whole-Body Control Framework
The robot commander supports five different operation modes, namely locomotion, locomanipulation, single-foot manipulation, single-gripper manipulation, and bimanual manipulation. Each mode takes in different user commands from either predefined planners, human motions, or joysticks, which are converted to desired states by a corresponding task commander in the Robot Commander. Then the unified whole-body controller (WBC) tracks the desired state based on LocoMan's kinematics and dynamics model.
Example of Teleoperation
We develop a low-cost vision-based teleoperation platform to detect the motions of the human torso, palm, and thumb, which are translated to command the 6D poses of LocoMan's torso and end effector, and the opening angle of its gripper.
Media
BibTeX
@article{lin2024locoman,
title={LocoMan: Advancing Versatile Quadrupedal Dexterity with Lightweight Loco-Manipulators},
author={Lin, Changyi and Liu, Xingyu and Yang, Yuxiang and Niu, Yaru and Yu, Wenhao and Zhang, Tingnan and Tan, Jie and Boots, Byron and Zhao, Ding},
journal={arXiv preprint arXiv:2403.18197},
year={2024}
}